Xiao Liu (Leo)
- Mountain View, California
- ThinkBeyondPossible
- [email protected]
- @its_hey_leo
- @liuxiao1468
- My Scholar Profile
- My LinkedIn Profile

I am currently a Senior Research Scientist in the Robot Intelligence Lab at Samsung Research America, where we are developing various robotic researches along with Foundation models. My research focuses on Robot Learning, Representation Learning, and Long-horizon task reasoning. My work has been presented at conferences such as CoRL, ICRA, and IROS. I earned my Ph.D. in Computer Science from the School of Computing and Augmented Intelligence at Arizona State University, supervised by Prof. Heni Ben Amor, and completed my Master’s at Case Western Reserve University under the guidance of Prof. Kiju Lee. Please feel free to review my curriculum vitae for further details.
Work Experiences
Senior Researcher, Samsung Research America
- Built full-stack humanoid robot infrastructure (Unitree G1): perception, planning, localization, navigation, manipulation.
- Developed agentic task planner with dynamic human guidance for long-horizon tasks in home environments.
Postdoc Scientist, Honda Research Institute
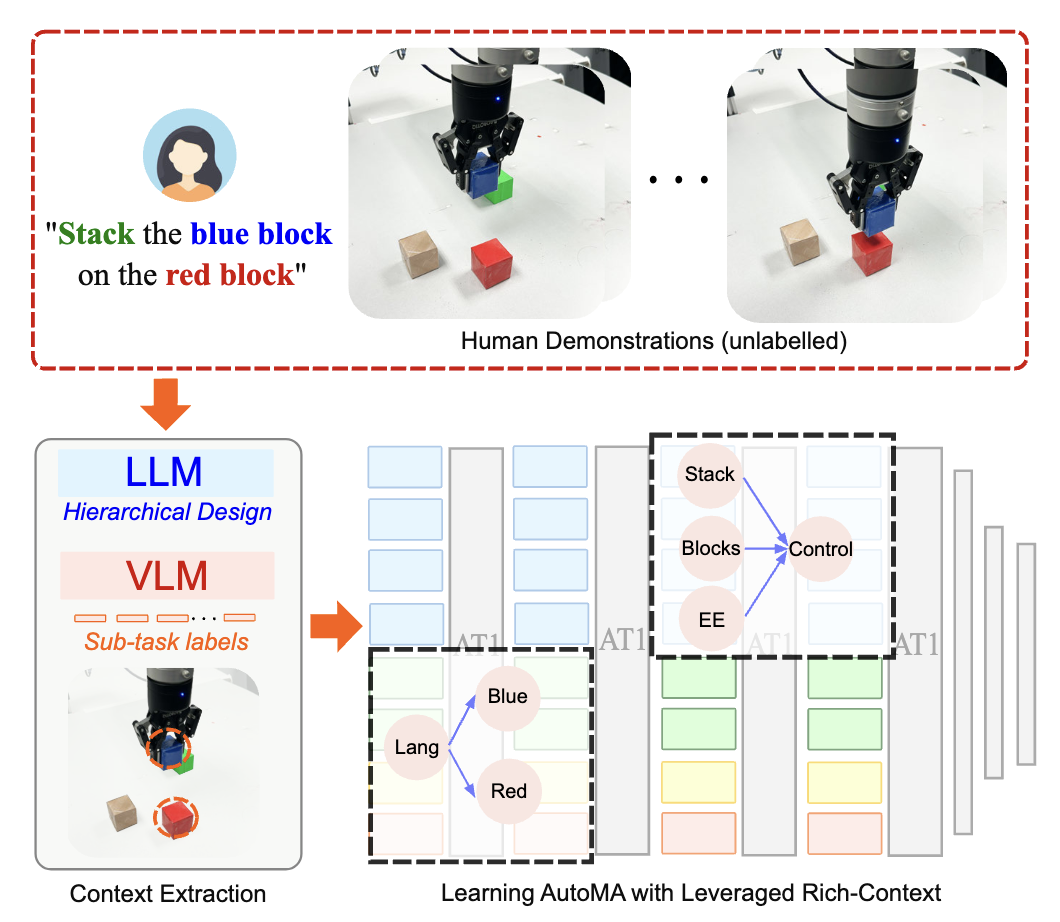
- System I&II: Create Intelligent Context Reasoning Agent via Large Vision Model and LLM, providing contexts for Long-horizon dexterous action policy.
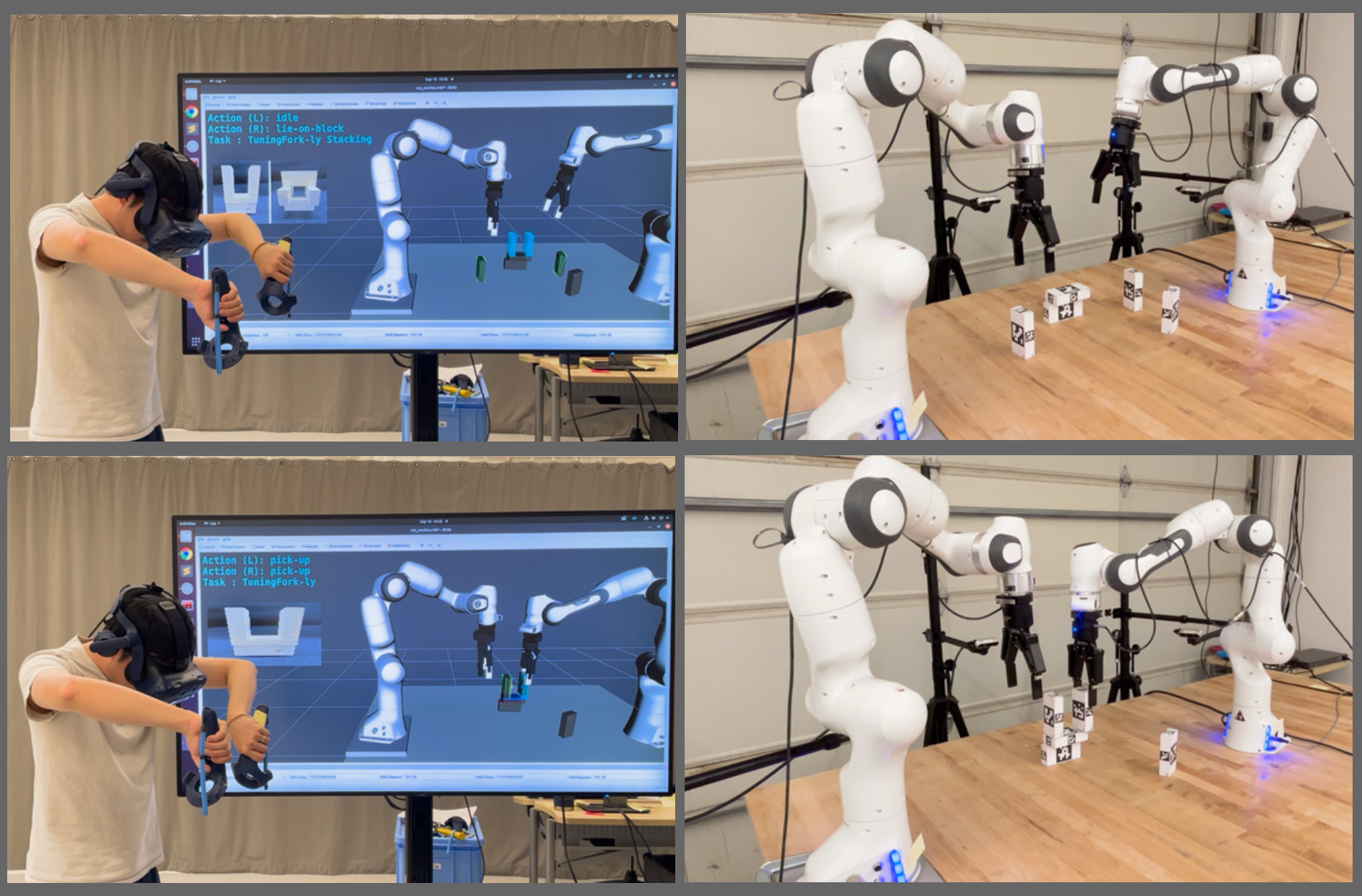
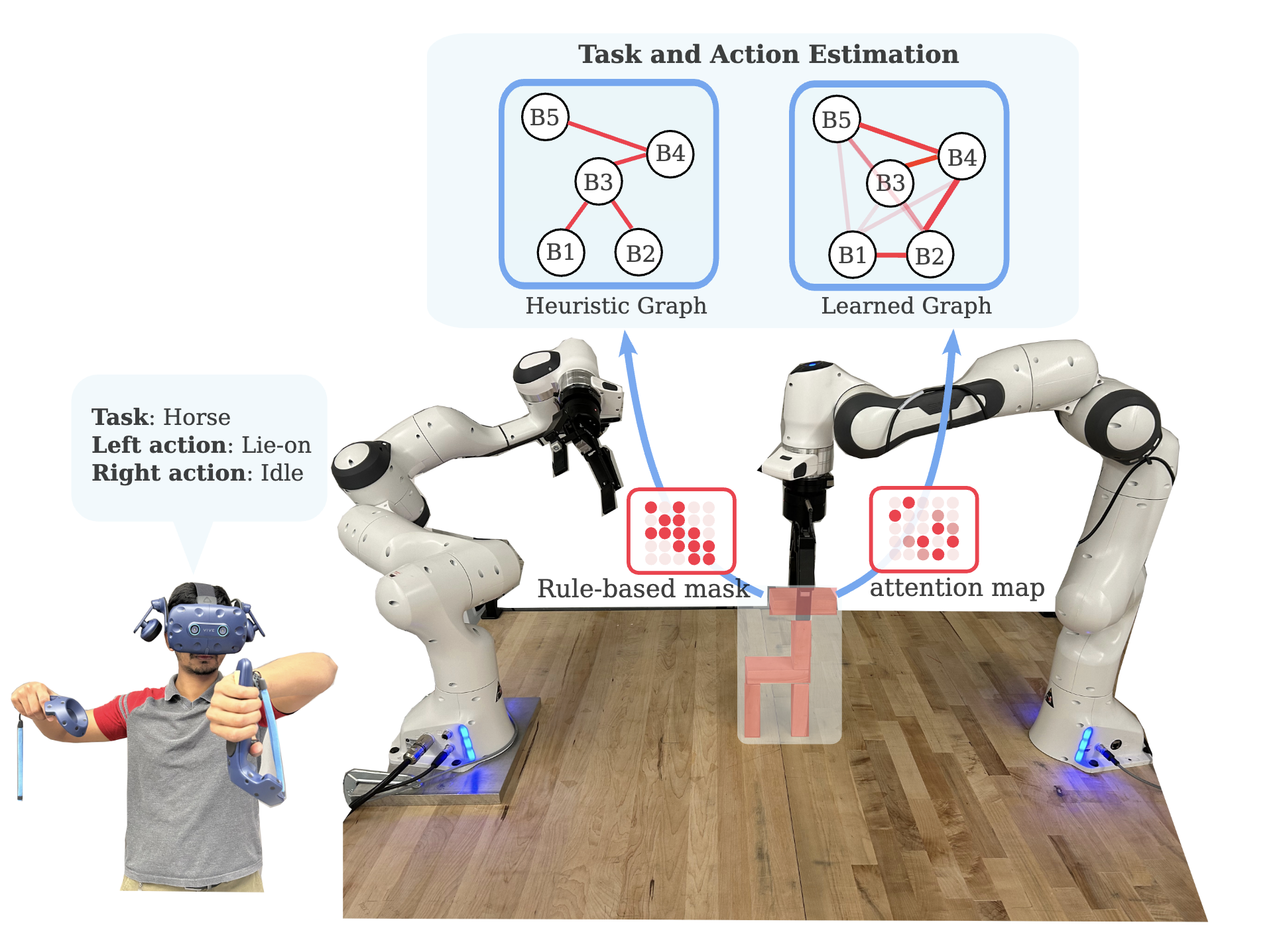
- Developed a scene graph‑based assistant generation framework for a teleoperated avatar robot. This framework facilitates task understanding, encodes spatial relationships during rearrangement tasks, and constructs planning‑capable graphs using graph edit distance.
Research Associate, Interactive Robotics Lab
Research topics: Robot Learning via Deep State-Space Modeling
- Embodied AI: Proposed Diff-Control, an action diffusion policy incorporating ControlNet from the domain of image generation to robot actions generation.
- Created a multimodal learning framework (α-MDF) using attention mechanism and differentiable filtering, which conducts state estimation in latent space with multiple modalities.
- Developed differentiable Ensemble Kalman Filters framework incorporating algorithmic priors for robot imitation learning.
Research Engineer (part-time), RadiusAI
Worked on multiple projects with different research items across computer vision, differentiable filters, optimizations.
- Developed and refined Multi-object tracking (MOT) algorithms using Bayes Filter for Video Analytics for indoor and outdoor cameras.
- Developed monocular depth prediction models with varied advanced architecture-Vision Transformer (ViT) and multi-scale local planar guidance (LPG) blocks
- Developed multi-objective optimization technique base on Frank-Wolfe algorithm for training across multiple datasets
Research Assistant, CWRU
Social robot project “Woody and Philos” team leader, collaborated research assistant of “e-Cube” project for human cognitive skill assessment.
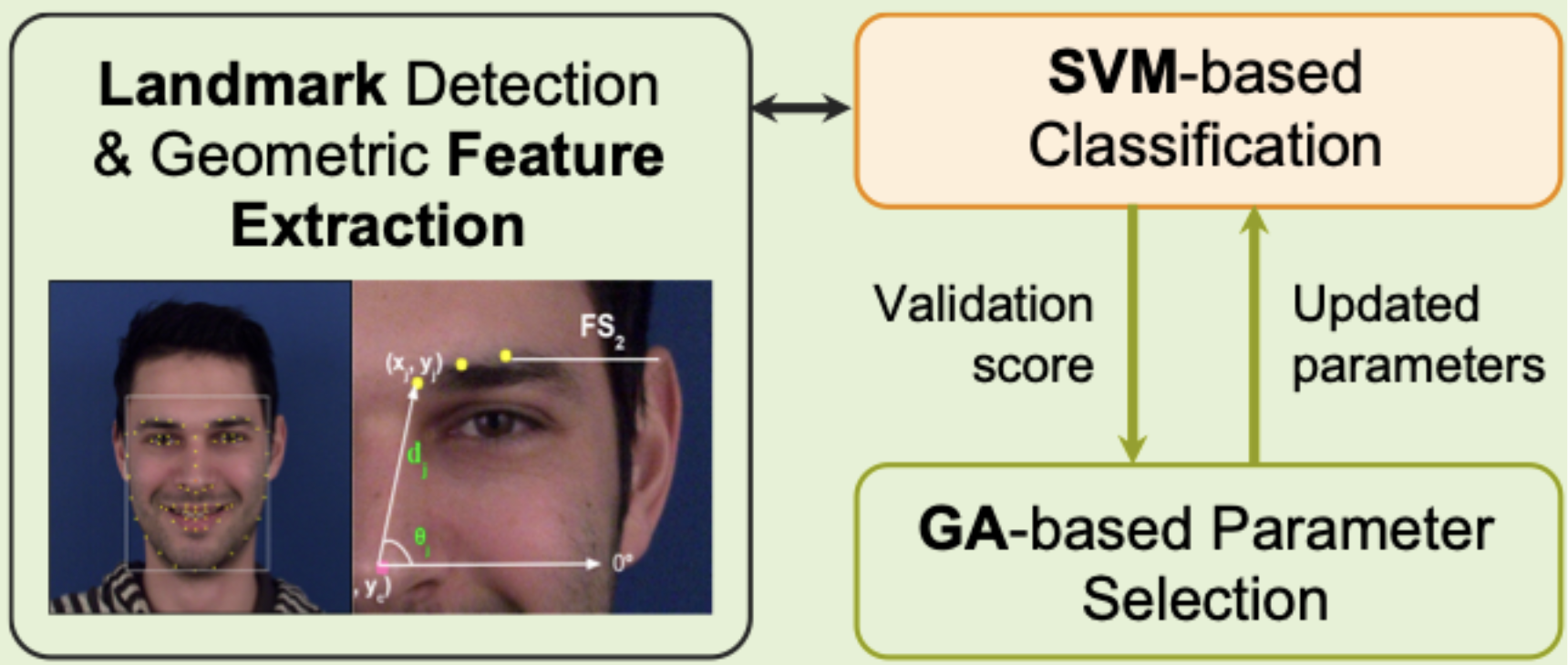
- Human Facial Emotion Expression Recognition for Human-robot Interaction Case Western Daily
- Human centered biomedical devices–“e-Cube” for cognitive skills assessment
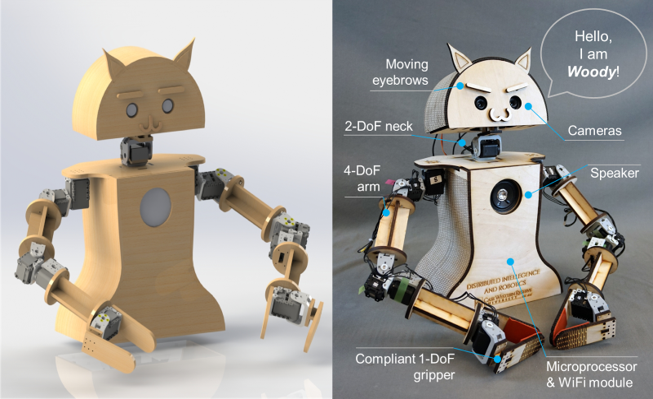
- Social robots–“Philos” & “Woody” ideastream
Publications, Presentations, …
Xiao Liu, Prakash Baskaran, Simon Manschitz, Wei Ma, Dirk Ruiken, Soshi Iba
IEEE International Conference on Robotics and Automation (ICRA) , 2026
Paper
Prakash Baskaran, Xiao Liu, Songpo Li, Soshi Iba
IEEE International Conference on Intelligent Robots and Systems (IROS) , 2025
Paper
Yifan Zhou, Xiao Liu, Quan Vuong, Heni Ben Amor
IEEE International Conference on Robotics and Automation (ICRA), submitted , 2025
Project Page / Paper
Xiao Liu, Yifan Zhou, Fabian Weigend, Shuhei Ikemoto, Heni Ben Amor
IEEE International Conference on Intelligent Robots and Systems (IROS) , 2024
Project Page / Paper
Xiao Liu, Fabian Weigend, Yifan Zhou, Heni Ben Amor
ICRA 2024 Workshop - Robot Learning Going Probabilistic , 2024
Project Page / Paper
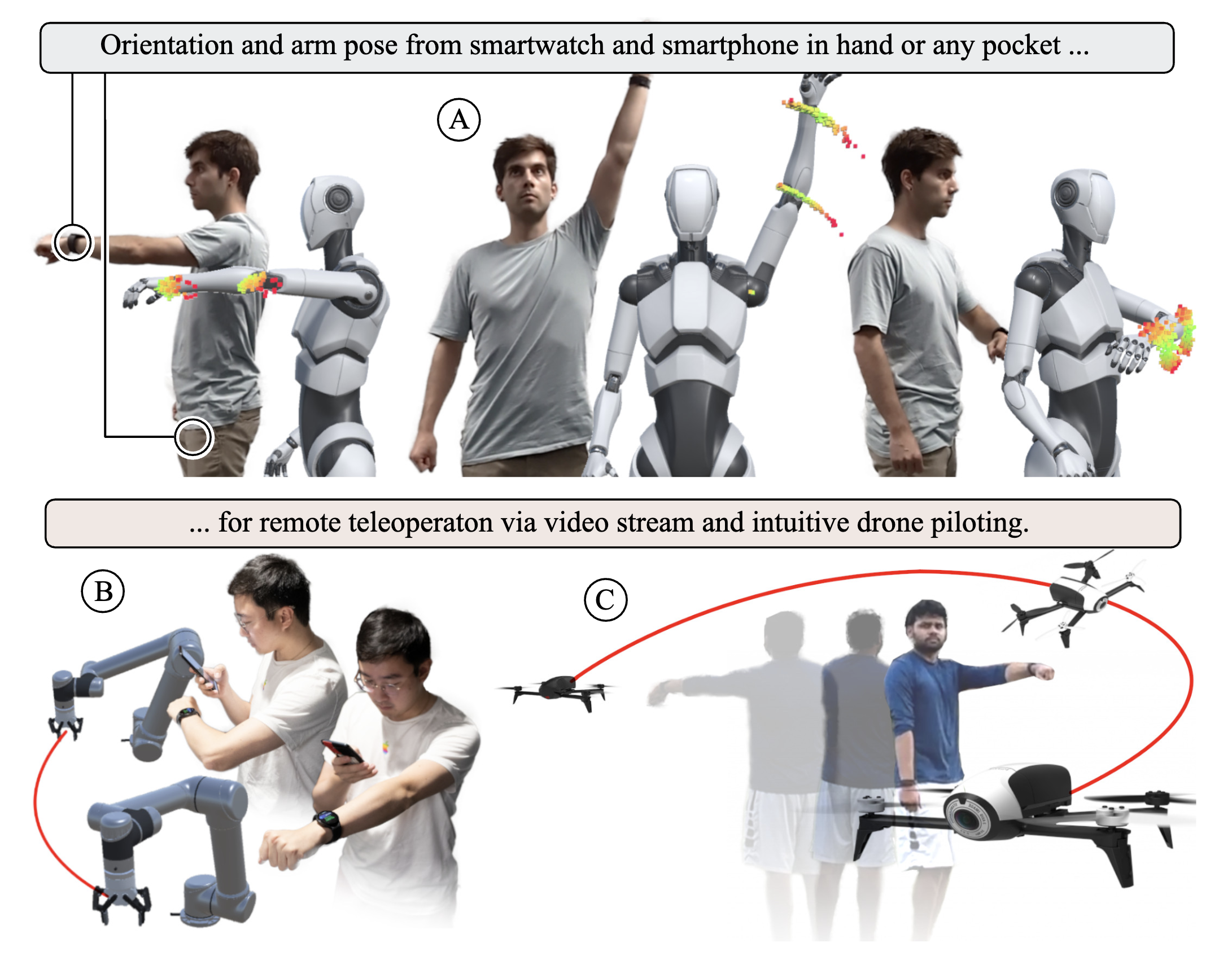
Fabian Weigend, Xiao Liu, Shubham Sonawani, Heni Ben Amor
IEEE International Conference on Robotics and Automation (ICRA) , 2024
Project Page / Paper / Video
Xiao Liu, Yifan Zhou, Shuhei Ikemoto, Heni Ben Amor
CoRL 2023 Workshop on Learning for Soft Robots , 2023
Project Page / Paper
Xiao Liu, Yifan Zhou, Shuhei Ikemoto, Heni Ben Amor
7th Conference on Robot Learning (CoRL) , 2023
Project Page / Paper / Video
Fabian Weigend, Xiao Liu, Heni Ben Amor
IEEE IROS Workshop DiffPropRob , 2023
Project Page / Paper
Xiao Liu, Geoffrey Clark, Joseph Campbell, Yifan Zhou, Heni Ben Amor
IEEE International Conference on Intelligent Robots and Systems (IROS) , 2023
Project Page / Paper
Xiao Liu, Shuhei Ikemoto, Yuhei Yoshimitsu, Heni Ben Amor
IEEE International Conference on Intelligent Robots and Systems (IROS) , 2023
Project Page / Paper
Xiao Liu, Xiangyi Cheng, Kiju Lee
IEEE Sensors Journal 21, no. 10: 11532-11542 , 2021
Code / Paper
Daniel Hayosh, Xiao Liu, Kiju Lee
IEEE 17th International Conference on Ubiquitous Robots (UR), pp. 247-252 , 2020
Project Page / Paper

Xiao Liu, Kiju Lee
IEEE Games Entertainment and Medias Conference. pp. 1-9 , 2018
Paper
Xiao Liu, Xiangyi Cheng, Kiju Lee. “e-Cube: Vision-based Interactive Block Games for Assessing Cognitive Skills: Design and Preliminary Evaluation,” CWRU ShowCASE.
Xiao Liu, Daniel Hayosh, Kiju Lee. “Woody: A New Prototype of Social Robotic Platform Integrated with Facial Emotion Recognition for Real-time Application,” CWRU ShowCASE.